小时候,梦想中的那片天空,仿佛伸手可及,却又永远触摸不到。曾经好想有一架飞机,能带我翱翔云端。而如今,飞机承载着我们当初的梦想,在那片广阔而宁静的天空,任由工程师的智慧和梦想自由驰骋。
。。。。。。 这台词我打出来也觉得恶心。废话不多说,这次DIY的作品是自己一直以来的目标——四轴飞行器。整个过程可谓是呕心沥血,请听我娓娓道来。
小试牛刀——小四轴V 1.0 说干就干,先把硬件搭好再说。参考着资料,把自己的小小飞控板画好,然后拿去打板。再焊接好。 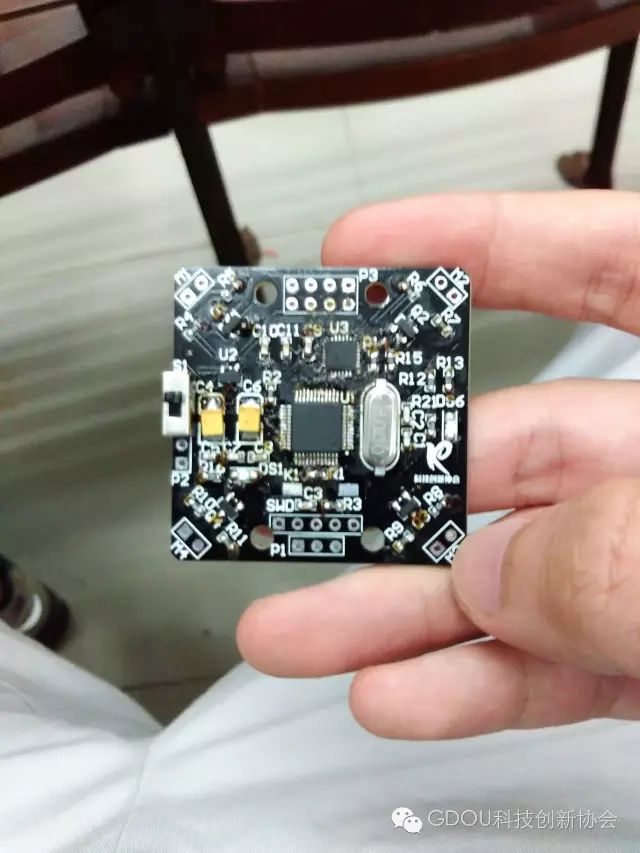
这里发生了一次电容爆炸事件,劝大家千万不要把电源正负极接反,否则后果很严重。 紧接着就是测试板子各模块功能是否能用。先测试陀螺仪,这里用的是匿名的上位机来检测飞控状态,得出姿态解算。 
发现还可以,波形也还好。因为陀螺仪MPU6050有一个DMP库,还是比较方便就得出姿态结算的。
之后在某宝上买来了机架和电机,把板子弄上去,把电机焊接上。
本以为一帆风顺,但是在测试无线遥控的时候,电机一打开,通信就失败,估计是电压不足的原因,加上板子电路还是存在很多缺陷,所以就一直卡在了这里。
最后的希望——小四轴V2.0 没办法,最终还是得重新画板,2.0版本改进了一下,包括: 1、电源稳压先升压后降压
2、模拟地和数字地的隔离
3、电机驱动上串上了一个二极管
4、NRF无线模块的电源和地之间串上一个大电容(这个非常重要)。 大的修改就基本是这些,还有些小修小改就不一一列出了。弄完这些后又开始继续。。。
万恶的PID调速 板子来后重复以上步骤,中途虽然是有点小插曲,但还是基本弄好。
直接拿搜来的资料,把遥控器也弄好,这里由于弄一个遥控器需要门槛要更高,所以就直接拿来主义了。。。
进入最后一步——PID调速,P代表比例,I代表积分,D代表微分,把P提高能提高上升的力度。。。好吧,其实我也不太懂。这里只能贴一个口诀在这里了: 参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低 PID不太会调,所以飞起来还是很不稳,将就一下吧,以后再慢慢调。确实很不稳。
总结 这次DIY的小四轴还是存在很多缺陷,要走的路还很长,这次的DIY也深深感受到了STM32的强大之处,这是51单片机永远也办不了的。不过这里也分享一些自己的经验吧,自己兜了几个弯路,分享经验希望也能帮助想DIY小四轴的人(可能有说错的部分(●'◡'●))。 1、像陀螺仪MPU6050这种QFN封装的元件是有点难焊接,最好在画板时预留一个直接上模块的接口,防止焊接失败。 2、电源部分最好是先升压至5V在降压至3.3V,因为电机打开的时候电压会降低,先升压后降压能保证电压稳定。 3、模拟地和数字地的隔离感觉用处不大,但为了得到准确的电源电压,最好还是隔离一下吧。 4、电机两头最好串上二极管,具体原因百度吧。。。( ▼-▼ ) 5、NRF24L01无线通信一定要在它的电源和地之间加一个大电容,否则很有可能电压不足,通信失败。 大概就是这些,可能有错的部分,欢迎高手拍砖(●'◡'●),配上航模的镇楼宝图,瞬间高大上,有木有! 特别鸣谢:匿名科创、圆点博士、无穷创新、正点原子等等的开源资料。
尾巴 不知为什么,当四轴能起飞的时候,自己却没有了预想中的那种兴奋感,反而在得出姿态角,无线通信实验成功,焊接的四五个瞬间却如此的难以忘怀。当初凭着点兴趣爱好就以为自己无所不能,而如今才发现自己有的也只是那一点兴趣爱好而已。生命不息,折腾不止。如果还有机会,大四轴见! | 

 /1
/1 


 |手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )
|手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )










 发表于 2016-8-8 11:32:46
发表于 2016-8-8 11:32:46




 发表于 2016-8-8 14:45:32
发表于 2016-8-8 14:45:32
