金牌会员
 
- 积分
- 1050
- 金钱
- 1050
- 注册时间
- 2016-5-13
- 在线时间
- 111 小时
|
 发表于 2016-5-29 16:35:30
|
显示全部楼层
发表于 2016-5-29 16:35:30
|
显示全部楼层
供你参考。
[mw_shl_code=c,true]// --------------------------------------------------------- //
// 函数名称:MotorEncoderInit
// 函数说明: 电机编码器初始化
// 输入参数: 无
// 输出参数: 无
// 返回值: 无
// 历史记录:
// <作者> <时间> <修改记录>
// lp 2015-06-29 创建该函数
// --------------------------------------------------------- //
static void MotorBEncoderInit(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/*开定时器时钟*/
RCC_APB1PeriphClockCmd(MOTORB_ENCODER_TIM_CLK, ENABLE);
/*开对应GPIO时钟*/
RCC_APB2PeriphClockCmd(MOTORB_ENCODER_CLK, ENABLE);
/*配置对应的GPIO*/
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = MOTORB_ENCODER_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(MOTORB_ENCODER_PORT, &GPIO_InitStructure);
/*配置定时器*/
TIM_DeInit(MOTORB_ENCODER_TIM);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0;
TIM_TimeBaseStructure.TIM_Period = 65535;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(MOTORB_ENCODER_TIM, &TIM_TimeBaseStructure);
/*配置定时器正交计数功能*/
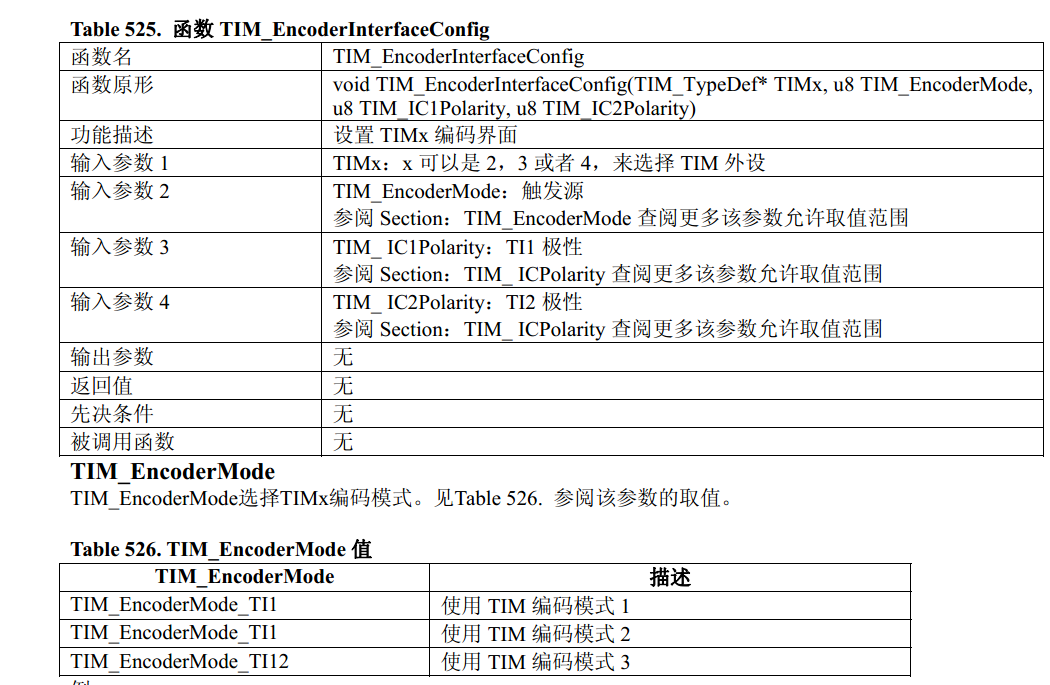
TIM_EncoderInterfaceConfig(MOTORB_ENCODER_TIM, TIM_EncoderMode_TI12,
TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = ICx_FILTER;
TIM_ICInit(MOTORB_ENCODER_TIM, &TIM_ICInitStructure);
/*清除定时器溢出中断*/
TIM_ClearFlag(MOTORB_ENCODER_TIM, TIM_FLAG_Update);
/*预先清除所有中断位*/
TIM_ClearITPendingBit(MOTORB_ENCODER_TIM, TIM_IT_Update);
/*由于16位的计数器会溢出,所以开定时器溢出中断,在中断里面加溢出值或着减溢出值*/
TIM_ITConfig(MOTORB_ENCODER_TIM, TIM_IT_Update, ENABLE);
TIM_Cmd(MOTORB_ENCODER_TIM, ENABLE);
/*清零编码器值*/
ClearEncodeBValue();
}
// --------------------------------------------------------- //
// 函数名称:TIM8_UP_IRQHandler
// 函数说明: TM8溢出中断函数,通过中断来累计脉冲数超出16定时器最大计数值的次数
// 输入参数: 无
// 输出参数: 无
// 返回值: 无
// 历史记录:
// <作者> <时间> <修改记录>
// lp 2015-06-30 创建该函数
// --------------------------------------------------------- //
void TIM4_IRQHandler(void)
{
int8 lCurDir = INVAL;
if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update);
lCurDir = GetMotorBDirection();
s_lTIM4UpOverCnt -= lCurDir; //lCurDir来确定是加一,还是减一
}
}
// --------------------------------------------------------- //
// 函数名称:GetMotor1EncoderValue
// 函数说明: 获取电机编码器计数值
// 输入参数: 无
// 输出参数: 无
// 返回值: 返回电机编码器脉冲个数,有符号,可以表示电机正反转记录的脉冲值
// 历史记录:
// <作者> <时间> <修改记录>
// lp 2015-06-30 创建该函数
// --------------------------------------------------------- //
int32 GetMotorBEncoderValue(void)
{
int32 lEncoderValue = 0;
lEncoderValue = MOTORB_ENCODER_TIM->CNT + s_lTIM4UpOverCnt*65536 - ENCODER_VALUE_OFFSET;
return lEncoderValue;
}
// --------------------------------------------------------- //
// 函数名称:ClearEncodeBValue
// 函数说明: 电机编码器计数值清零
// 输入参数: 无
// 输出参数: 无
// 返回值: 无
// 历史记录:
// <作者> <时间> <修改记录>
// lp 2015-06-30 创建该函数
// --------------------------------------------------------- //
void ClearEncodeBValue(void)
{
MOTORB_ENCODER_TIM->CNT = ENCODER_VALUE_OFFSET;
s_lTIM4UpOverCnt = 0;
}[/mw_shl_code] |
|


 /1
/1 


 |手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )
|手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )










 楼主
楼主