|
MS35009描述 MS35009 是一款镜头驱动系统芯片,由于它的微步进特性,可以满足复杂,精致,低噪音的镜头驱动系统。微步进驱动功能控制模块集成在芯片中,可以极大降低 CPU的功耗。另外,芯片集成了直流电机与音圈电机马达驱动,可以满足不同的镜头系统。 主要特点 内置 7 个通道的驱动模块,H 桥最大驱动电流±0.8A SPI 串行总线通信控制电机 负载电压范围:2.7V--5.5V QFN44 封装 封装图 
管脚图 
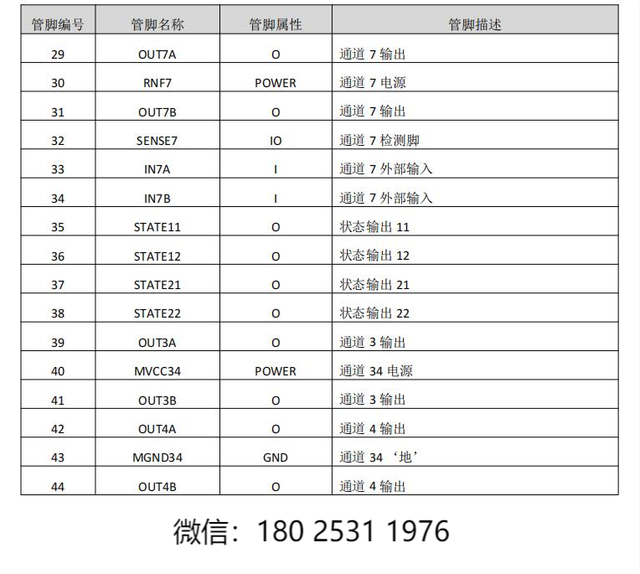
管脚说明图 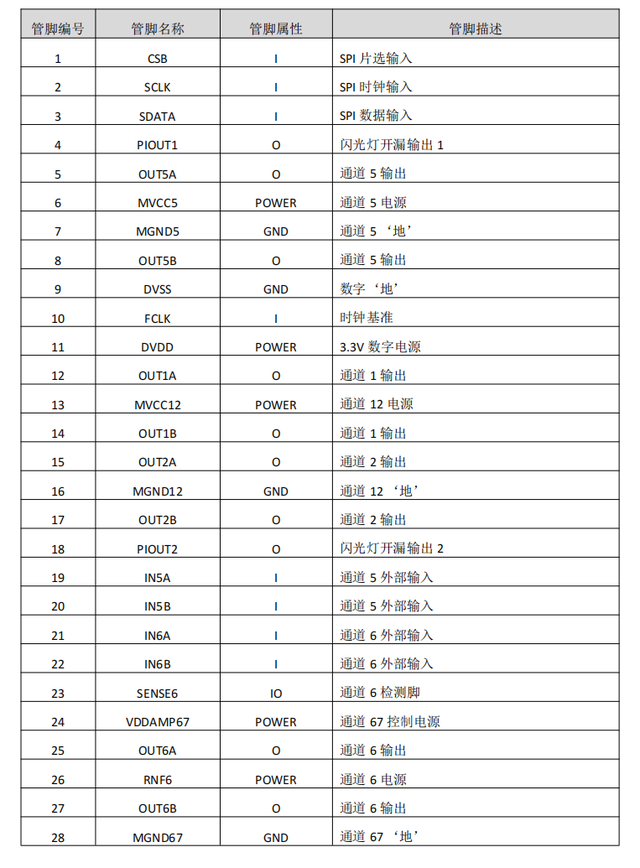
内部框图 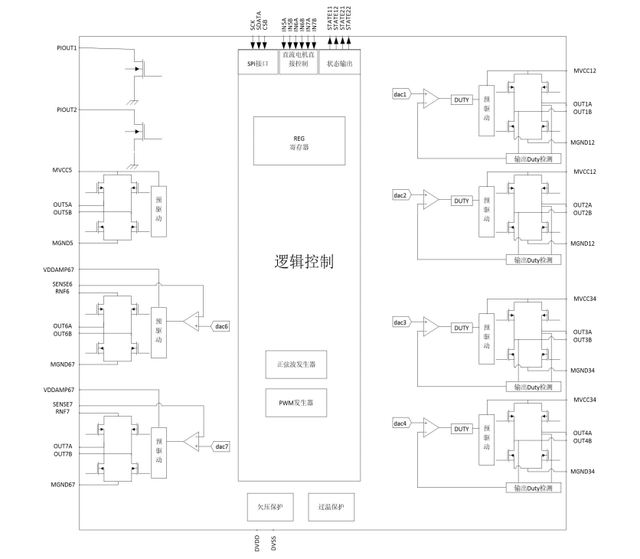
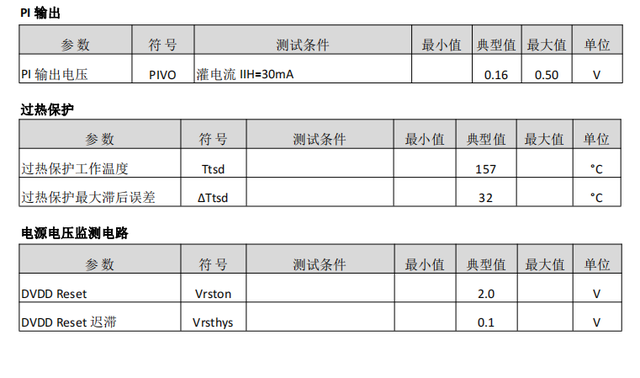
电气参数 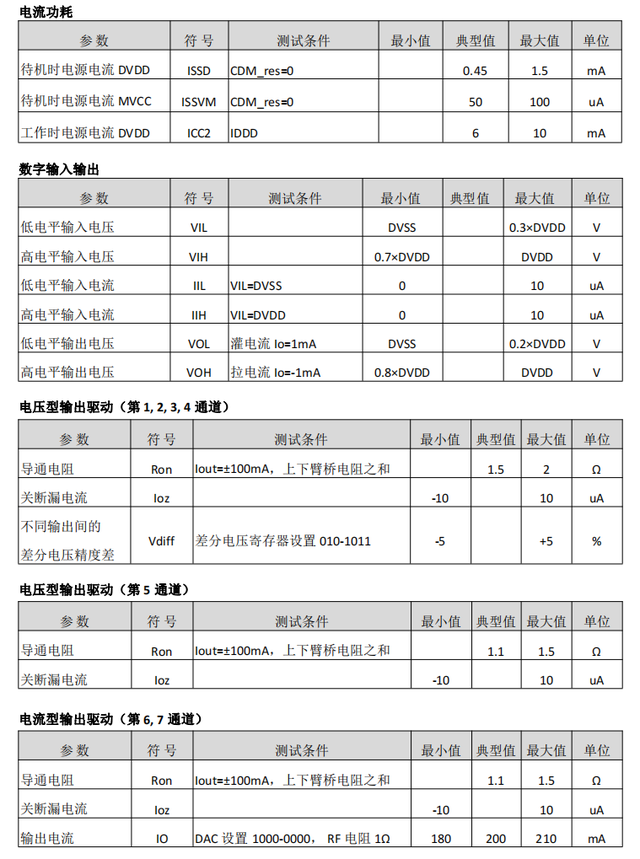
功能描述 1. 系统模块介绍 步进电机驱动(第 1 到 4 通道) 内置细分的 PWM 驱动模式,最多可以驱动两个步进电机。 内置电压反馈的类似 D 类功放的驱动模式。 第 3,4 通道可以做为独立的直流电机驱动或者音圈电机驱动.步进电机通过设置相关的寄存器进行行为控制。可以选择 1024 的微细分模式,1-2 相位,2 相位模式。另外系统带指令缓存器,当电机在运转当前指令时,设置后面的指令,从而电机可以持续运转。 电机的运行状态指示 ACT,与电机转动位置信息 MO,可以通过 STATExx 脚读出。 控制框图如下: 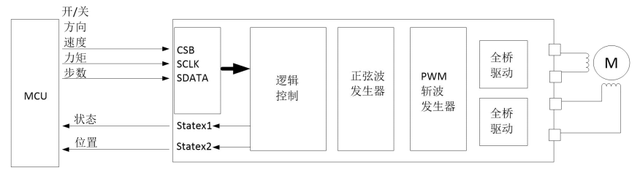
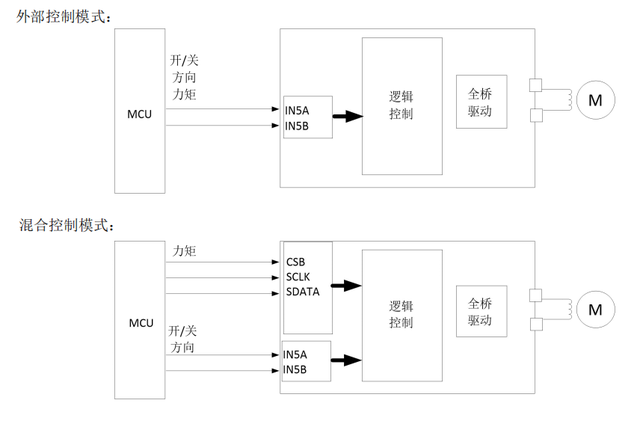
直流电机驱动(第 5 通道) 直流电机驱动是电压型的 PWM 斩波控制。 此电机驱动既可以通过 SPI 设置寄存器设置,同时由于外置了直接控制管脚,也可以通过外部的管脚控制,又或者可以两者结合的混合控制。 SPI 模式控制: 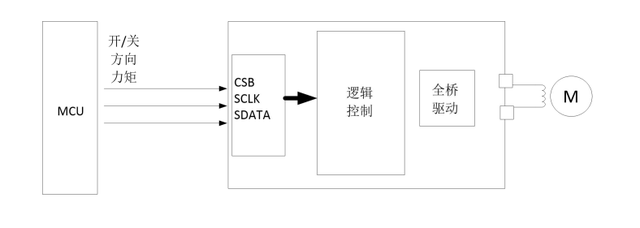
电流型直流驱动(第 6,7 通道) 第 6,7 通道为电流型的输出驱动,内置恒电流模式的驱动器。 RNF 脚的电压与 RNF 脚的电阻关系,决定了电机的输出电流,内部集成了高精度的比较器来是电流稳定。 如果 RNF 脚存在寄生的电阻,将会影响电流的精度,需要特别注意。 电流型的驱动可以通过 SPI 来设置寄存器的方式控制,也可以与外部的输入脚混合控制。 SPI 控制模式:通过 SPI 设置电流大小,状态和方向。 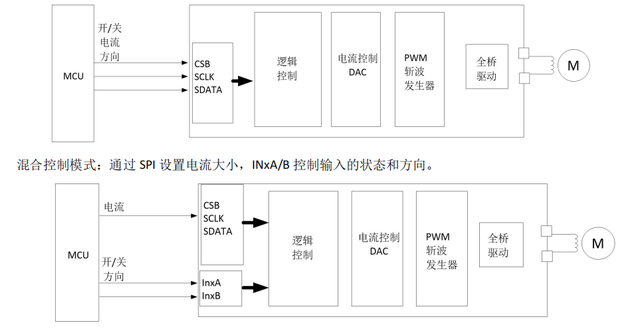
系统应用 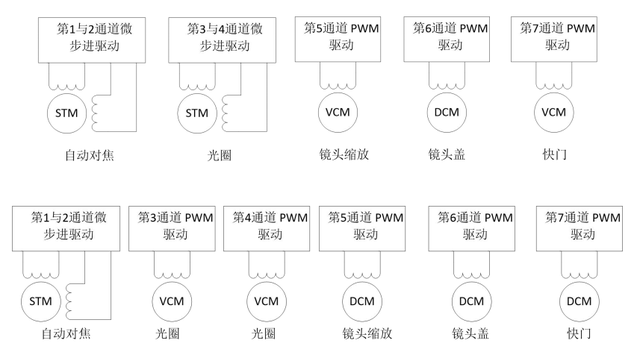
3. SPI 接口 3 线串行接口 控制命令由 16 位串行数据构成,从 CSB、SCLK 和 SDATA 引脚进入(高位先入)。最高 4 位为地址位,其余 12 位为数据位。 每 1 位由 SDATA 引脚进入的数据,在每个 SCLK 的上升沿被读取。 数据在 CSB 为低电平时写入有效,但不同寄存器的数据录入时刻有所区别(详见注 4,5)。 
寄存器 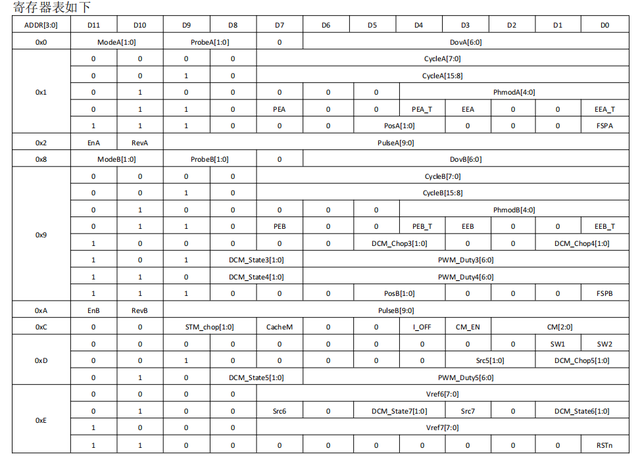
注: 1. 寄存器表中,xxA 与 xxB 分别对应于 Ach 和 Bch。 2.Ach 被定义为由 1ch 和 2ch 驱动输出,Bch 被定义为由 3ch 和 4ch 输出。 3.在复位(resetting)之后(包括上电复位和通过 CMD_RS 寄存器复位),所有寄存器都被置为初始态。 4.对于 Mode, DOV, Cycle, En 和 Rev 寄存器,写入的数据在 Pulse 寄存器写入之前等待,在 Pulse 寄存器数据写入完成后的 CSB 信号上升沿被应用。且 Mode, DOV, Cycle, En 和 Rev 寄存器有缓存寄存器,除这些之外的寄存器则没有。 5. 对于 Pos, FSP, DCM_Chop, DCM_State 和 PWM_duty 寄存器,写入的数据在数据写入完成后的 CSB 信号上升沿被应用,除这些之外的寄存器的写入数据在第 16 个 SCLK 信号上升沿被应用。 典型应用图 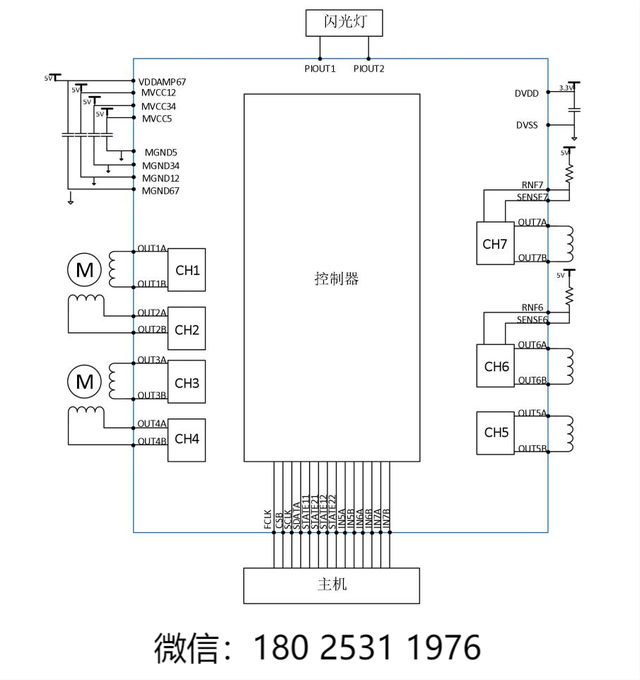
| 

 /1
/1 


 |手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )
|手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )










 发表于 2022-7-20 20:42:02
发表于 2022-7-20 20:42:02
