初级会员

- 积分
- 121
- 金钱
- 121
- 注册时间
- 2019-6-18
- 在线时间
- 25 小时
|

楼主 |
发表于 2019-9-9 20:56:09
|
显示全部楼层
SPI是一个四条线的串行通信协议,包括一条时钟线,两条数据线和一条使能线,如果在一组SPI上复用多个SPI器件,则会有多个使能线。
AD5441是一个SPI控制的DAC,它的数据类型如下:
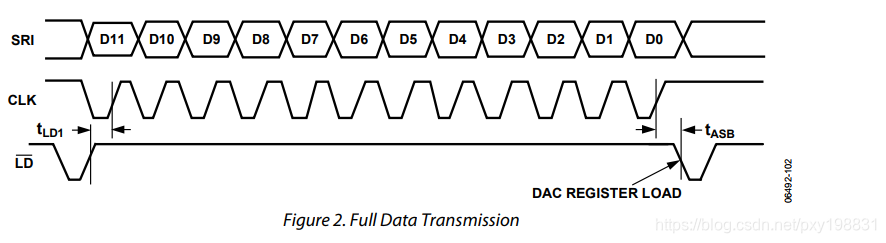
上升沿发送数据,低电平使能,符合库函数TPYE1,附上程序如下:
#include "SPI_U27_U28.h"
void initialize_SPI(void)
{
DrvGPIO_InitFunction(E_FUNC_SPI1); /* PC.8, PC.9, PC.11 设置为SPI */
DrvGPIO_InitFunction(E_FUNC_SPI1_SS1); /* PB.9 设置为SPI */
DrvSYS_UnlockProtectedReg(); /* 解锁受保护的系统寄存器 */
DrvSYS_SetIPClock(E_SYS_SPI1_CLK, 1); /* 使能SPI端口1的核心时钟 */
DrvSYS_LockProtectedReg(); /* 对系统寄存器上锁 */
DrvSPI_Open(eDRVSPI_PORT1, /* 打开SPI端口1 */
eDRVSPI_MASTER, /* 设为主控 */
eDRVSPI_TYPE1, /* 时钟空闲状态为低电平,在串行时钟下降沿传输数据,上升沿锁存数据 */
12); /* 每次传输12比特 */
DrvSPI_SetClockFreq(eDRVSPI_PORT1, /* 设定SPI端口1的时钟频率 */
2000000, /* 可变时钟1频率为2M */
1000000); /* 可变时钟2频率为1M */
/* 若不选择可变时钟,复位默认时钟源为可变时钟1即DIVIDER的频率,具体可见芯片手册 */
delay(100); /* 延时使时钟稳定 */
DrvSPI_DisableAutoSS(eDRVSPI_PORT1); /* 禁止SPI端口1的自动从选择功能 */
DrvSPI_SetTriggerMode(eDRVPORT1, eDRVSPI_LEVEL_TRIGGER); /* 设置从引脚为电平激活模式 */
DrvSPI_SetSlaveSelectActiveLevel(eDRVSPI_PORT1, eDRVSPI_ACTIVE_LOW_FALLING); /* 设置端口1从引脚为低电平激活 */
DrvSPI_SetEndian(eDRVSPI_PORT1, /* 设置SPI端口1数据传送为高字节在前 */
eDRVSPI_MSB_FIRST);
}
/* 函数名:SPI_U27_write
功能:调制度写函数
出口参数:无
入口参数:调制度的值,无符号32位(uint型) */
void SPI_U27_write(uint32_t modulation_value_)
{
while(DrvSPI_IsBusy(sDRVSPI_PORT1)) /* 查询SPI端口1是否忙 */
{
}
DrvDPI_SetSS(eDRVSPI_PORT1, /* 激活SPI端口1的从引脚1 */
eDRVSPI_SS1);
DrvSPI_SingleWrite(eDRVSPI_PORT1, &modulation_value_); /* 将调制度的值送到SPI发送器中 */
DrvSPI_SetGo(eDRVSPI_PORT1); /* 开始发送 */
DrvSPI_ClrSS(eDRVSPI_PORT1, eDRVSPI_SS1); /* 使从引脚1非激活 */
}
/* 函数名:monitor_D6
功能:功率写函数
出口参数:无
入口参数:功率的值,无符号32位(uint型) */
void SPI_U28_write(uint32_t power_value_)
{
while(Drv_IsBusy(eDRVSPI_PORT1)) /* 查询SPI端口1是否忙 */
{
}
DrvSPI_SetSS(eDRVSPI_PORT1, /* 激活SPI端口1的从引脚0 */
eDRVSPI_SS0);
DrvSPI_SingleWrite(eDRVSPI_PORT1, &power_value_); /* 将功率的值送到SPI发送器中 */
DrvSPI_SetGo(eDRVSPI_PORT1); /* 开始发送 */
DrvSPI_ClrSS(eDRVSPI_PORT1, eDRVSPI_SS0); /* 使从引脚0非激活 */
}
头文件为
#ifndef SPI_U27_U28_h
#define SPI_U27_U28_h
#include "common_variables.h"
#include "DrvSPI.h"
#include "delay.h"
#include "DrvGPIO.h"
#include "DrvSYS.h"
extern void initialize_SPI(void); /* SPI初始化 */
extern void SPI_U27_write(uint32_t modulation_value_); /* 芯片U27写入函数 */
extern void SPI_U28_write(uint32_t power_value_); /* 芯片U28写入函数 */
#endif |
|


 /1
/1 


 |手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )
|手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )








 发表于 2019-9-9 19:44:38
发表于 2019-9-9 19:44:38



