管理员

- 积分
- 165778
- 金钱
- 165778
- 注册时间
- 2010-12-1
- 在线时间
- 2124 小时
|
 发表于 2017-4-25 11:38:52
|
显示全部楼层
发表于 2017-4-25 11:38:52
|
显示全部楼层
http://bbs.ednchina.com/BLOG_ARTICLE_282960.HTM
STM32的每个TIMER都有正交编码器输入接口,TI1,TI2经过输入滤波,边沿检测产生TI1FP1,TI2FP2接到编码器模块,通过配置编码器的工作模式,即可以对编码器进行正向/反向计数。
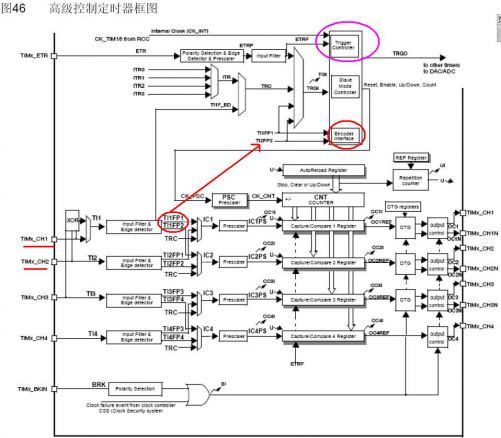
如下图,编码器使用了A,B两相信号,但是我只需要对TI1信号进行计数(第一行),我也是刚发现了这个错误,原来对两个信号都计数,导致码盘转一周得到不止100个脉冲(100线的光电码盘)。通过STM32的编码器模块比较两想的电平信号就可以很容易地计算出编码器的运行情况了。

下面是我调试OK的代码:
void Encoder_Configration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
//PC6 A相 PC7 B相
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
/* Enable the TIM3 Update Interrupt */
/*NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQChannel;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = TIMx_PRE_EMPTION_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = TIMx_SUB_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);*/
/* Timer configuration in Encoder mode */
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // No prescaling
TIM_TimeBaseStructure.TIM_Period = 10000;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM8, TIM_EncoderMode_TI12,
TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 6;//ICx_FILTER;
TIM_ICInit(TIM8, &TIM_ICInitStructure);
// Clear all pending interrupts
TIM_ClearFlag(TIM8, TIM_FLAG_Update);
TIM_ITConfig(TIM8, TIM_IT_Update, ENABLE);
//Reset counter
TIM2->CNT = 0;
TIM_Cmd(TIM8, ENABLE);
}
n_Counter = TIM_GetCounter(TIM8);
Diled_Disp_Num((float)n_Counter);
另外一个值得注意的问题是,STM32 的定时器是16位的,意思是只能计数到65535,有两种方法,一是采用链式的方式用两个定时器将16位扩展为32位,还有一种简单的方法就是开启定时器的溢出中断,每中断一次就代表编码器运转了特定的角度。
比如编码器是400线的,将ARR寄存器设置为400,每溢出中断一次就代表电机转了一圈,以此类推。
另外,关于输入脉冲的检测,其实是类似的,只不过在STM32内部是专门用了一个外部触发模块来实现的,如图一中紫色框的标注,编码器模块应该是在这个模块上的升级,下面是配置代码:
void TIM3_ETR_GetDropCounts_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
//test PA0 TIM8_ETR
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x00;
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); // Time base configuration
TIM_ETRClockMode2Config(TIM3, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0);
TIM_SetCounter(TIM3, 0);
TIM_Cmd(TIM3, ENABLE);
}
转帖》 http://blog.ednchina.com/yemingxp/269451/message.aspx
http://bbs.ednchina.com/BLOG_ARTICLE_1473143.HTM
STM32学习笔记之正交编码器接口
最近做一个项目,主控芯片用STM32RBT6,要用到光栅尺,本来带一个控制器的,通过控制器的232可以读取光栅尺的数据,但这个控制器太大,设备中放不下,于是,考虑自己做一个,网上看到很多有用CPLD的方案,后来无意间发现stm32的定时器可以配置成编码器,甚喜
高兴之余,突然发现stm32的定时器是16位的,我的光栅尺的计数会超过65535,于是在21ic论坛上和几位高手请教,最终确定的方案
工作过程是配置TIM3为正交编码器模式,并定一个10ms的中断,每10ms读取一次计数值,10ms的前提是在10ms内计数器不溢出(这个思想要感谢21ic的lxyppc)
以下是部分代码:(这些代码修改于ST官方的例程,但我的工程用的是V3的固件库,他们的例程貌似是0.3的,所以有些地方有改动)
下面是初始化TIM3为正交编码器模式
void ENC_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
/* Encoder unit connected to TIM3, 4X mode */
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* TIM3 clock source enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
/* Enable GPIOA, clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_StructInit(&GPIO_InitStructure);
/* Configure PA.06,07 as encoder input */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Enable the TIM3 Update Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = TIMx_PRE_EMPTION_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = TIMx_SUB_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* Timer configuration in Encoder mode */
TIM_DeInit(ENCODER_TIMER);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // No prescaling
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(ENCODER_TIMER, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(ENCODER_TIMER, TIM_EncoderMode_TI12,
TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = ICx_FILTER;
TIM_ICInit(ENCODER_TIMER, &TIM_ICInitStructure);
// Clear all pending interrupts
TIM_ClearFlag(ENCODER_TIMER, TIM_FLAG_Update);
TIM_ITConfig(ENCODER_TIMER, TIM_IT_Update, ENABLE);
//Reset counter
TIM2->CNT = COUNTER_RESET;
// ENC_Clear_Speed_Buffer();
TIM_Cmd(ENCODER_TIMER, ENABLE);
}
以下为获取一次计数值,此算法来自lxyppc,可以规避超过16位的情况,具体细节见http://bbs.21ic.com/viewthread.php?tid=110623的讨论
s16 ENC_Get_Electrical_Angle(void)
{
static u16 lastCount = 0;
u16 curCount = ENCODER_TIMER->CNT;
s32 dAngle = curCount - lastCount;
if(dAngle >= MAX_COUNT){
dAngle -= ENCODER_TIM_PERIOD;
}else if(dAngle < -MAX_COUNT){
dAngle += ENCODER_TIM_PERIOD;
}
lastCount = curCount;
return (s16)dAngle;
}
以下为系统滴答的初始化和中断函数
void TB_Init(void)
{
/* Setup SysTick Timer for 10 msec interrupts */
if (SysTick_Config(SystemFrequency / 100))
{
/* Capture error */
while (1);
}
}
void SysTick_Handler(void)
{
/*if (hTimebase_display_500us != 0)
{
hTimebase_display_500us --;
}
*/
if (hSpeedMeas_Timebase_500us !=0)
{
hSpeedMeas_Timebase_500us--;
}
else
{
hSpeedMeas_Timebase_500us = SPEED_SAMPLING_TIME;
CurrentCount += ENC_Get_Electrical_Angle();
//ENC_Calc_Average_Speed must be called ONLY every SPEED_MEAS_TIMEBASE ms
//ENC_Calc_Average_Speed();
}
}
以上代码已通过测试,固件库版本为:V3.1.2
ST官方例程和中文说明文档:http://www.stmicroelectronics.co ... oder_AN%28CH%29.pdf
http://images.stmicroelectronics ... 32F10xxx_Encoder_AN(CH).zip
最后抱怨一句,st为啥不把定时器做成32位的呢,能增加1分钱成本吗?
| | [tr][/tr]
| 回复 [url=]举报[/url]
| | |
| 4楼
 楼主| 发表于 2013-4-26 10:38:28 | 只看该作者 楼主| 发表于 2013-4-26 10:38:28 | 只看该作者
| | [tr][/tr]
| 回复 [url=]举报[/url]
| | |
| 5楼
楼主| 发表于 2013-4-26 10:40:58 | 只看该作者
|
|
|
|


 /1
/1 


 |手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )
|手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )








 发表于 2017-4-25 11:38:51
发表于 2017-4-25 11:38:51





 楼主
楼主
