初级会员

- 积分
- 74
- 金钱
- 74
- 注册时间
- 2018-11-3
- 在线时间
- 17 小时
|
1金钱
STM32 定时器(TIM5 普通定时器)比较输出模式输出可控数量脉冲控制步进马达,单路控制没有问题(只使用TIM5->CHN1),但同时使用两路CHN,出现问题,排查问题发现,问题出在当仅触发CHN1的比较输出中断时,进入中断处理函数,4路CHN+UPG状态位 竟然同时置位(看下面截图)。
按照手册的描述,只会有CC1IF 被置位才对。
下面是的初始化函数和触发函数
int focus_motor_timer_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
uint16_t timer_period = ((SystemCoreClock / TIM5_PSC) / 600);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_OCStructInit(&TIM_OCInitStructure);
//TIM_ICStructInit(&TIM_ICInitStructure);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = timer_period -1;
TIM_TimeBaseStructure.TIM_Prescaler = TIM5_PSC - 1;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure);
GPIO_Set(GPIOA, PIN0, GPIO_MODE_AF, GPIO_OTYPE_PP, GPIO_SPEED_100M, GPIO_PUPD_PD);
GPIO_AF_Set(GPIOA, 0, GPIO_AF_TIM5);
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle; //TIM_OCMode_PWM1 也一样的现象
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse = (uint32_t)((timer_period / 2) - 1); //50%占空比
TIM_OC1Init(TIM5, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM5, TIM_OCPreload_Disable);
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x03;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ITConfig(TIM5, TIM_IT_CC1, ENABLE);
TIM_Cmd(TIM5,DISABLE);
}
int motor_trig(bool dir, uint32_t number, uint32_t freq)
{
TimerPeriod = ((SystemCoreClock / TIM5_PSC) / freq);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = (TimerPeriod - 1); //自动重装载寄存器周期的值,溢出值
TIM_TimeBaseStructure.TIM_Prescaler = TIM5_PSC - 1; //时钟频率预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:输入捕获模式用来滤波
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; //设置重复溢出次数,就是多少次溢出后进入中断,一般为0,只有高级定时器才有用
TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure); //设置缺省值,这一步最好加上
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //翻转模式定时器引脚同时输出pwm 这样就不用翻转任意io了
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_Pulse = (uint32_t)((TimerPeriod / 2) - 1); //设置待装入捕获比较寄存器的脉冲值
TIM_OC1Init(TIM5, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM5, TIM_OCPreload_Disable);
TIM_Cmd(TIM5, ENABLE);
}
|
|


 /1
/1 


 |手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )
|手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )








 发表于 2022-11-9 11:06:06
发表于 2022-11-9 11:06:06
 楼主
楼主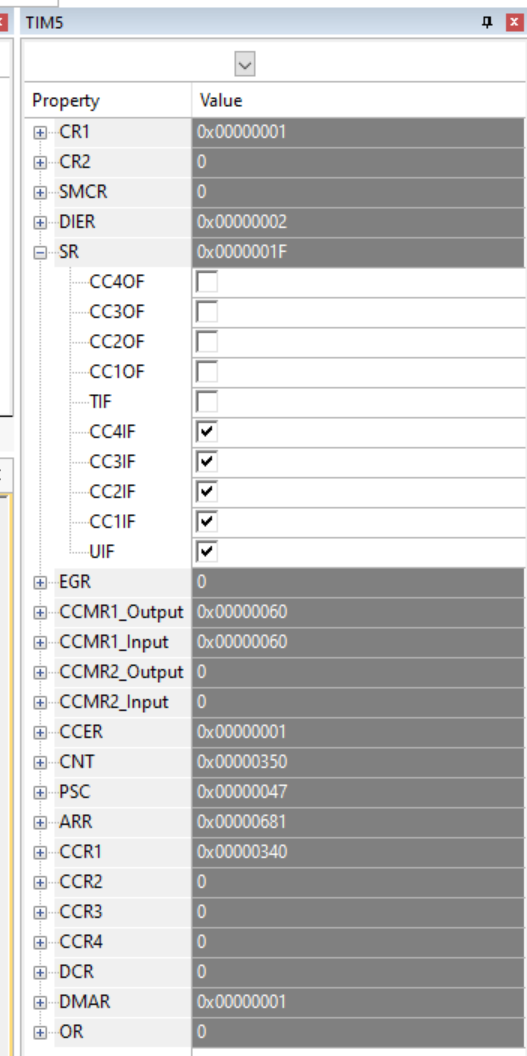





 发表于 2022-11-16 23:45:58
发表于 2022-11-16 23:45:58
