|
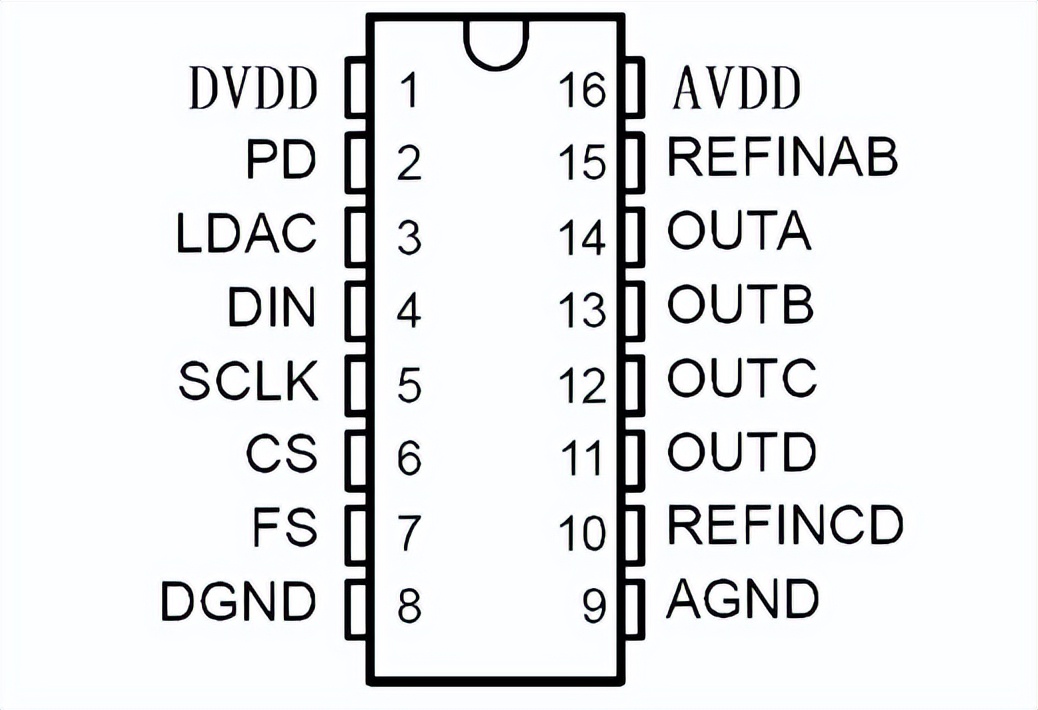
MS5614描述 MS5614是一款12bit四通道输出的电压型DAC,接口采用四线串口模式,可以兼容TMS320、SPI、QSPI和Microwire串口。MS5614控制数据有16bit,包括DAC地址,控制字节,和12bitDAC数据。MS5614具有两组电源,数字电源(DVDD和DGND)和模拟电源(AVDD和AGND),电源范围是2.7V到5.5V。 电阻串输出接到一个AB类输出轨到轨buffer,其增益是6dB放大输出,输出bufffer提高了稳定性且降低了建立时间。MS5614具有掉电模式,可以优化工作时的功耗。 MS5614 有 SOP16 和 TSSOP16 两种封装。 主要特点  12bit 精度  可编程建立时间 3us 或 9us  兼容 TMS320,SPI,QSPI,Microwire 接口 内部上电复位  低功耗,5V 时 8mW,3V 时 3.6mW  集成 REF 缓冲器  输出范围是 2 倍的基准电压  对温度不敏感  软件、硬件 Power down 电源电压:2.7V-5.5V 应用  数字伺服系统控制  数字补偿和增益调节  工业过程控制  机械和移动控制设备  大容量存储设备 MS5614 Pin=Pin TLV5614 脚位完全匹配直接就能用 封装 
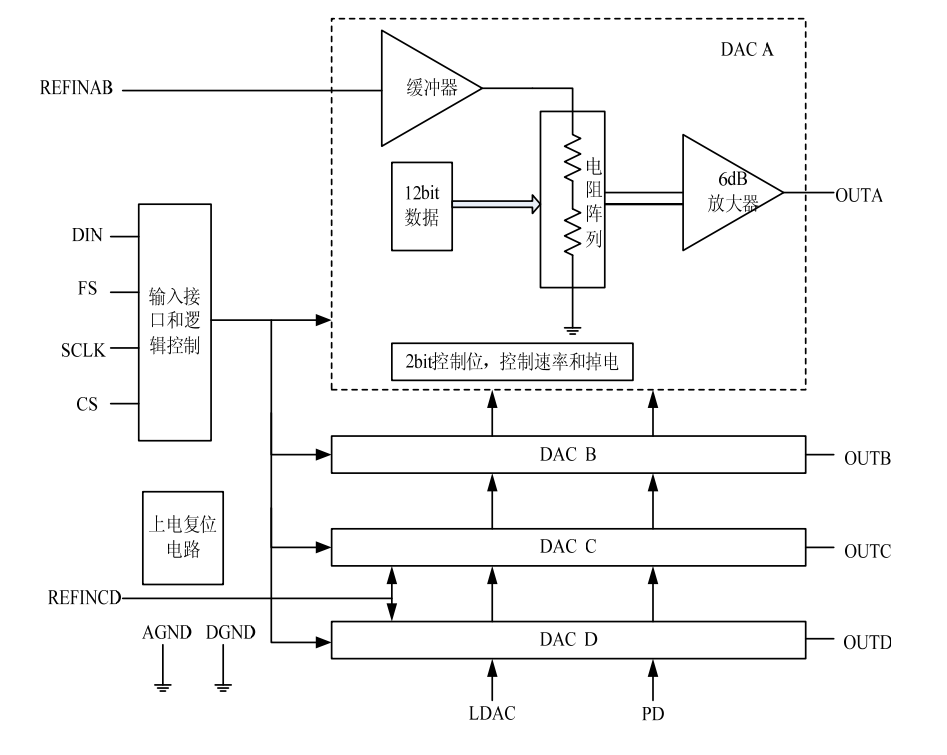

应用说明 总体功能 MS5614 是一个 12bit 单电源的数模转换器,其架构采用电阻阵列结构,集成了串行接口、速率和关断逻辑控制、基准输入缓冲器、电阻串和输出轨到轨放大器。 输出电压可以表示为: 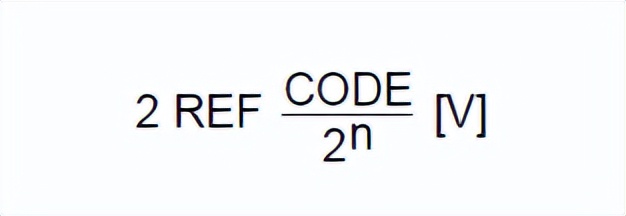
串行接口 器件必须设置在 CS 为低电平时有效,然后在 FS 的下降沿开始按位输入数据(开始为高电平有效),在 16bit 都被转移后或 FS 变高时,内部 DAC 更新对应的输出电平。 MS5614 串口可以采用两个基本模式:四线(使用片选 CS)和三线(不使用片选 CS),使用片选使得多个器件可以连接到串行口德数据源(DSP 或 MCU),且接口和 TMS321 类兼容。下图给出了 2 个 MS5614 接到 TMS320DSP 的示例。 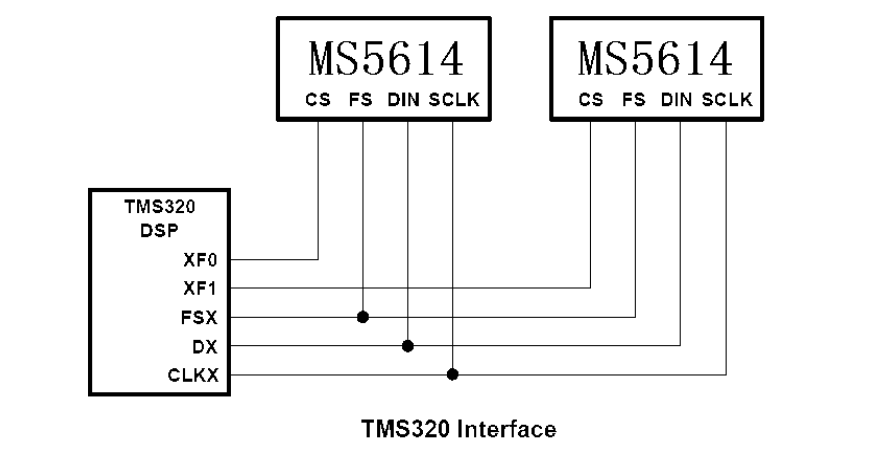
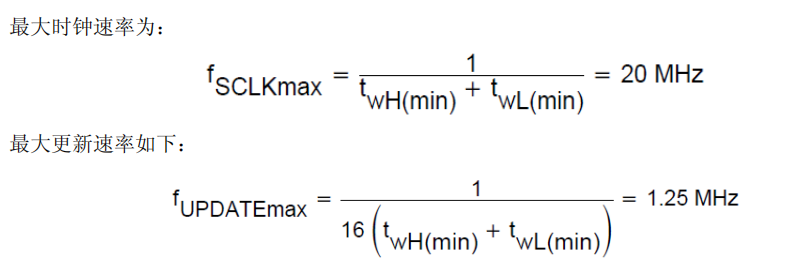
串行时钟速率和数据更新速率 如果串行总线上只有一个器件,那么 CS 可以接恒定低电平。下图给出了 MS5614 如何在 SPI或 Microwire 接口三线引脚连接到一个 TMS320 的例子。 
数据格式 MS5614 的数据字有两部分构成:控制位(D15~D12)和数字数据(D11~D0)。 
PWR:功耗控制,1 为关断模式,0 为正常工作模式 SPD:速率控制,1 为快速模式,0 为慢速模式 A1、A0 为内部 DAC 通道地址选择位,真值表如下: 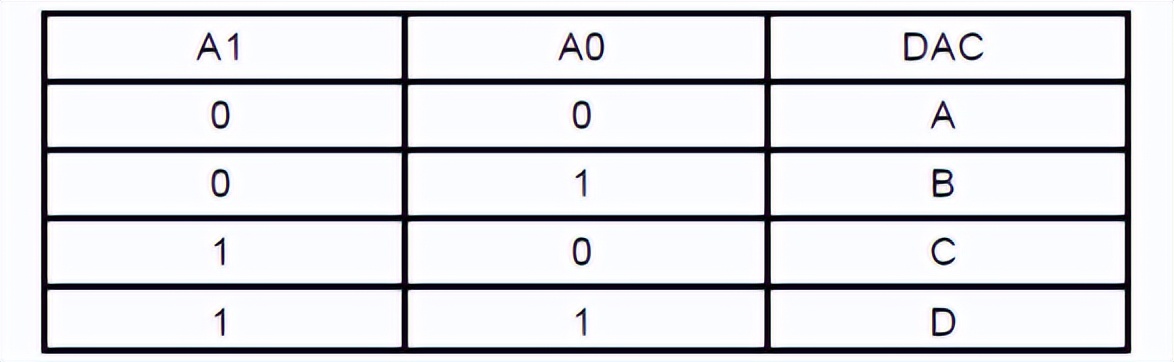
电源供电旁路和地管理 印刷电路板将模拟地和数字地分开以提高系统性能。绕线板的性能不好,所以一般不被使用。两个地板面应该连接低阻抗的供电电源上,最好的地连接应该将 DAC 模拟地端连接在系统的模拟地板面,以此确保模拟地电流能够很好的管理。 一个 0.1uF 的陶瓷电容旁路应该接在 VDD 和 AGND 之间,并且安装在离芯片尽可能近的地方,若使用磁环能够进一步将系统的模拟电源和数字电源分开。
| 

 /1
/1 


 |手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )
|手机版|OpenEdv-开源电子网
( 粤ICP备12000418号-1 )










 发表于 2022-5-31 22:04:08
发表于 2022-5-31 22:04:08
